

Robot cộng tác VC và các thành phần robot
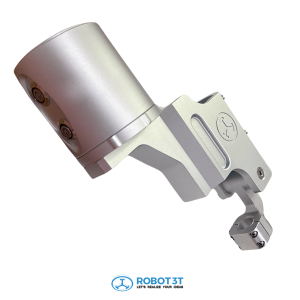
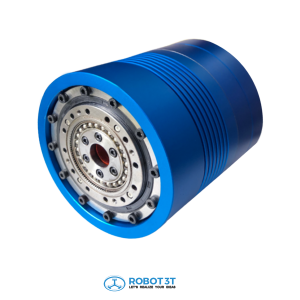
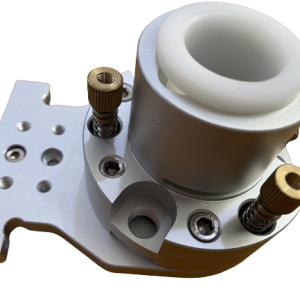
Khớp robot và cơ cấu chấp hành cuối
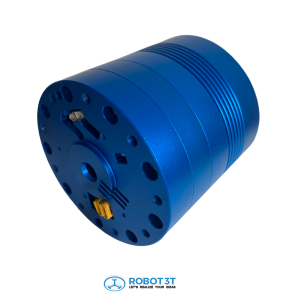
Khớp robot và cơ cấu chấp hành cuối

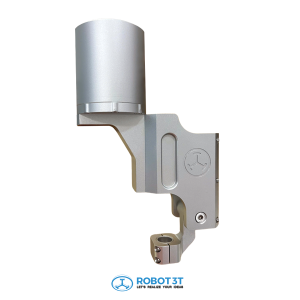
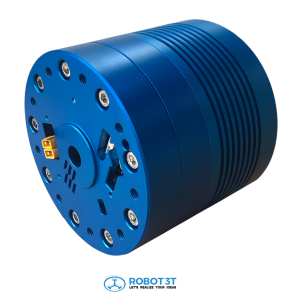
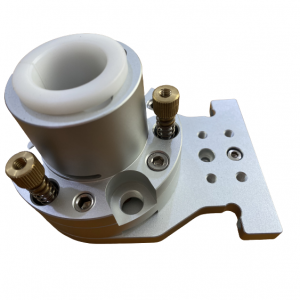
Khớp robot và cơ cấu chấp hành cuối

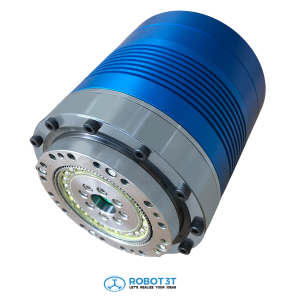
Khớp robot và cơ cấu chấp hành cuối
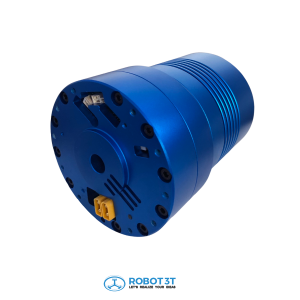
Khớp robot và cơ cấu chấp hành cuối


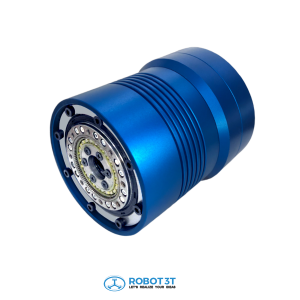
Các dòng robot cộng tác

Khớp robot và cơ cấu chấp hành cuối

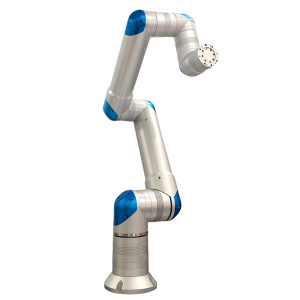
Các dòng robot cộng tác


Các dòng robot cộng tác

Các dòng robot cộng tác

Các dòng robot cộng tác
Các bộ điều khiển chuyển động
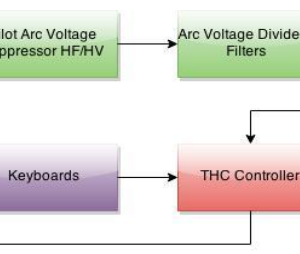
Các mô đun và bộ điều khiển máy cắt CNC
Các mô đun và bộ điều khiển máy cắt CNC


Các mô đun và bộ điều khiển máy cắt CNC


Các mô đun và bộ điều khiển máy cắt CNC

Các mô đun và bộ điều khiển máy cắt CNC
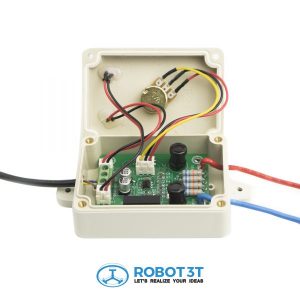
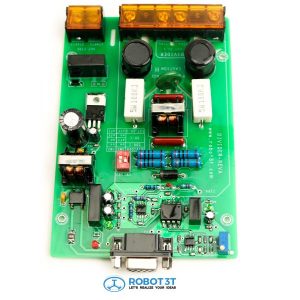
Compact THC3T-02 ngõ ra UP/ DOWN cho Hypertherm chạy với Mach3

Các mô đun và bộ điều khiển máy cắt CNC
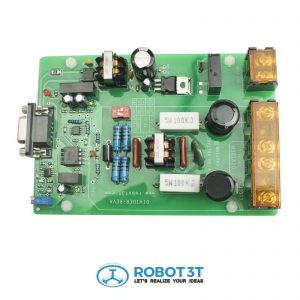
Compact THC3T-02 ngõ ra STEP/DIR cho Hypertherm chạy với Mach3
Các mô đun và bộ điều khiển máy cắt CNC
Các mô đun và bộ điều khiển máy cắt CNC

Các mô đun và bộ điều khiển máy cắt CNC

Các mô đun và bộ điều khiển máy cắt CNC


Các mô đun và bộ điều khiển máy cắt CNC

Các mô đun và bộ điều khiển máy cắt CNC

Các mô đun và bộ điều khiển máy cắt CNC
Robot công nghiệp R3T

Các dòng robot công nghiệp tải nhẹ


Các dòng robot công nghiệp tải nhẹ


Các dòng robot công nghiệp tải nhẹ


Các dòng robot công nghiệp tải nhẹ


Các dòng robot công nghiệp tải nhẹ


Các dòng robot công nghiệp tải nhẹ


Các dòng robot công nghiệp tải nhẹ
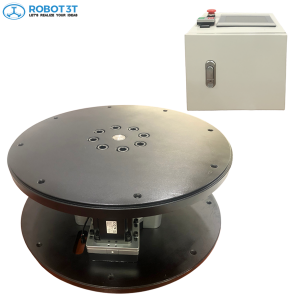
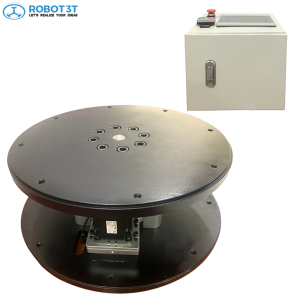
Các dòng cấp phôi tự động dạng cuộn
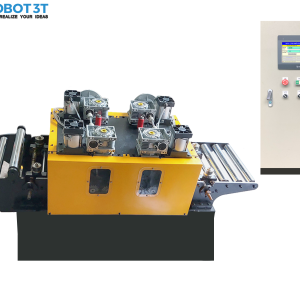

Các dòng cấp phôi tự động dạng cuộn


Các dòng cấp phôi tự động dạng cuộn

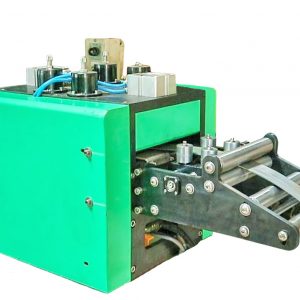
Các dòng cấp phôi tự động dạng cuộn


Các dòng cấp phôi tự động dạng cuộn
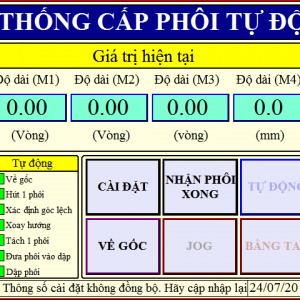

Các dòng cấp phôi tự động dạng cuộn
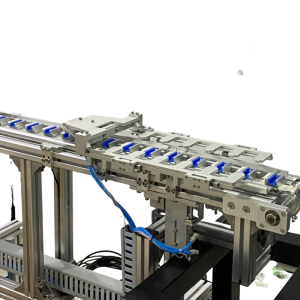
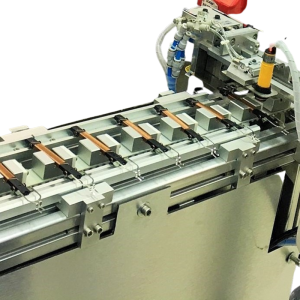
Các dòng cấp phôi tự động dạng cuộn